The
first branch of Mechanics called Kinematics was created to explain the motions
of the object but without concerning the external cause on that object. It was
just made to explain the motions of the objects. All other branches in
mechanics were only started after this Kinematics.
Thus
Kinematics plays a main role in Mechanics. These kinds of branches are just
made to understand Mechanics easily by piercing it to many various topics. It needs
not to be confused with these different names of branches.
Since
we are interested in simple motions, the study of motion [Kinematics] had begun
with translational motion and not with the Rotational as it is complicated for
beginners.
Note:
A body is said to be rigid if the distance between any
two various particles of the body remains invariant under the action of any
external force.
Translational Motion:
A rigid body is said to undergo translational motion if
it moves in such a way that it always remains parallel to itself. This means
that a line connecting any two various particles of the rigid body always
remains parallel to itself throughout the motion. All particles of the rigid
body should have same speed, displacement, velocity and acceleration. It means
that the rigid body should not rotate itself about any axis in that body. Hence
the Size of the body is not important in Translational motions. It is as same
as the object to be considered as a point object.
So
the task for the Scientists was to represent “Translational Motion” using
Mathematics. But they end with the Cartesian Co-ordinate system through a simple
hypothesis.
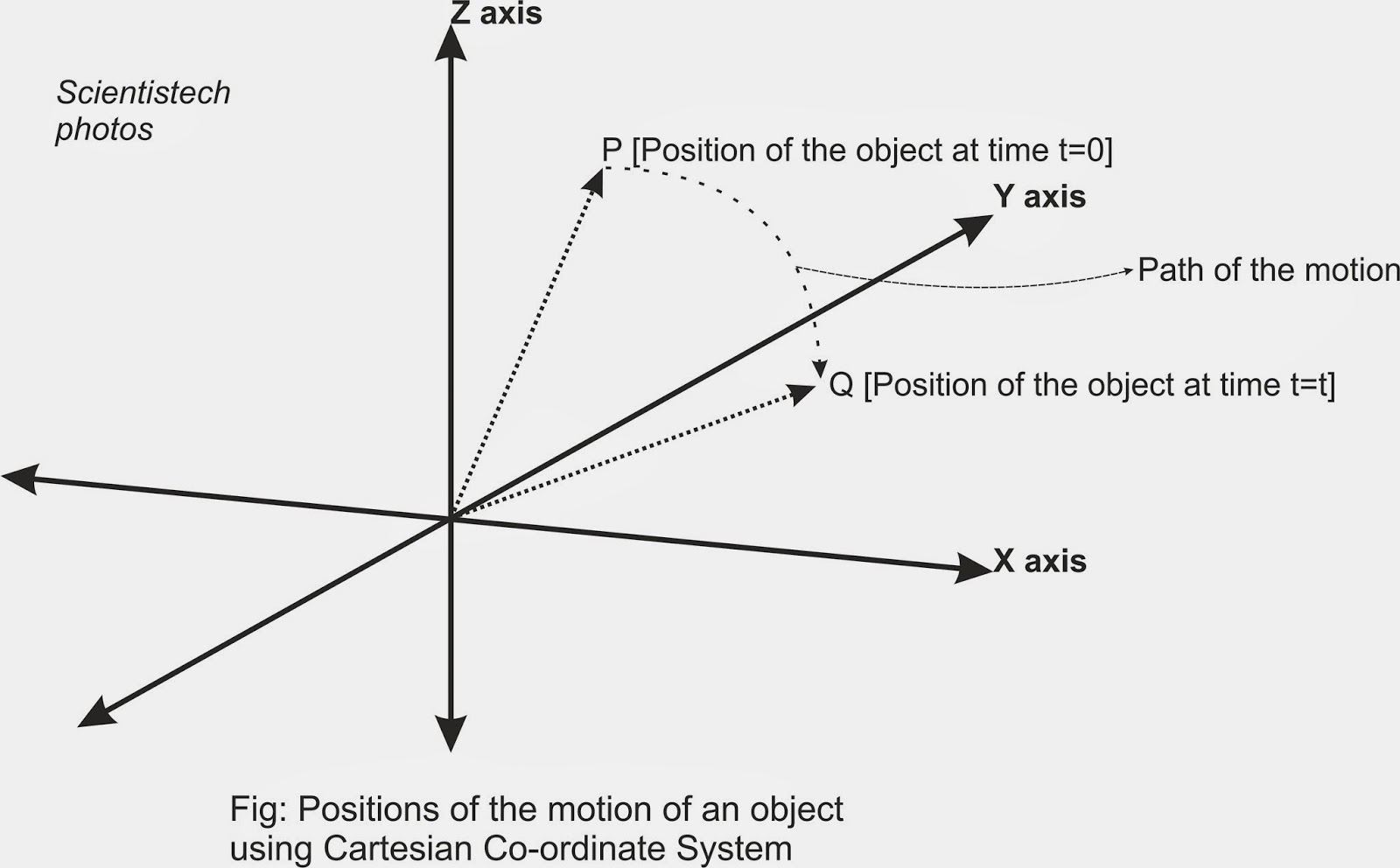
In
Cartesian Co-ordinate system, the positions in space are specified using the
points and the number lines of X and Y axis. The space itself is represented by
full of these points and axis lines.
So, any position can be referred
uniquely to only one point in this system. The size and the shape of the object
cannot be included.
As
far as we concerned in translation motion, we don’t need to care about the size
and the shape of the objects for we just want to calculate “the change in
position” of that object.
Positions are very important than the size and the shape of the object while dealing
with Translational motions.
And
so our ancient Scientists solved the problem of size and shape with a simple
assumption that we have already discussed in translational motion.
Note: Assumptions are often made each and every time in Physics because these assumptions are the
stepping stone for our understanding of the Physics. Assumptions are the one
just made to describe the observations made in Nature. We need to be more careful
about these assumptions and should not believe entirely in this.
And
the assumption made was,
“All objects should be considered as a point mass and point size” in space
though it has real shape and size.
Note: Motion of objects
with Unavoidable shapes and size will be studied in Rotational Mechanics.
With the point assumption,
we connected the Mathematics of Cartesian Co-ordinate system with the Motions
of the objects. Now the problem of positions is solved.
The position of a moving
object in space is specified in Cartesian System as,
{kind=link}
But the motion is about the change
in positions and for that, we need some mathematics of length, direction,
types of measurements, units, functions and finally differentiation and
integration with full history.
No comments:
Post a Comment
Let everyone know what you think about this